Синхронные двигатели с постоянными магнитами и преобразователями частоты: эффективное решение для АСУ ТП

Синхронные двигатели с постоянными магнитами (СДПМ) широко используются в современных системах промышленной автоматизации: от прецизионных станков и роботов до насосов и вентиляторов в системах ОВиК. Энергоэффективность, компактность и точность управления делают их оптимальным выбором при построении электроприводов в АСУ ТП. В сочетании с современными преобразователями частоты такие двигатели позволяют строить высокоточные приводы. Однако быстрый рост промышленности и цифровизация требуют сегодня повышенной эффективности и гибкости от электроприводов. Добиться этого можно с помощью частотного регулирования скорости электродвигателя путем изменения частоты питающего напряжения.
Что представляют собой СДПМ?
Работа с СДПМ требует знания особенностей их конструкции, алгоритмов управления и параметров настройки преобразователя. СДПМ – это разновидность синхронных машин, в которых на роторе вместо обмотки возбуждения стоят постоянные магниты. Эта конструкция исключает необходимость подачи тока возбуждения, снижает тепловые потери и упрощает компоновку, что особенно важно при построении энергоэффективных и компактных электроприводов.
Как и любой электродвигатель, СДПМ состоит из двух основных частей:
- статор – неподвижный элемент с трехфазной обмоткой, формирующей вращающееся магнитное поле;
- ротор – вращающаяся часть, содержащая постоянные магниты с высокой коэрцитивной силой (рис. 1).
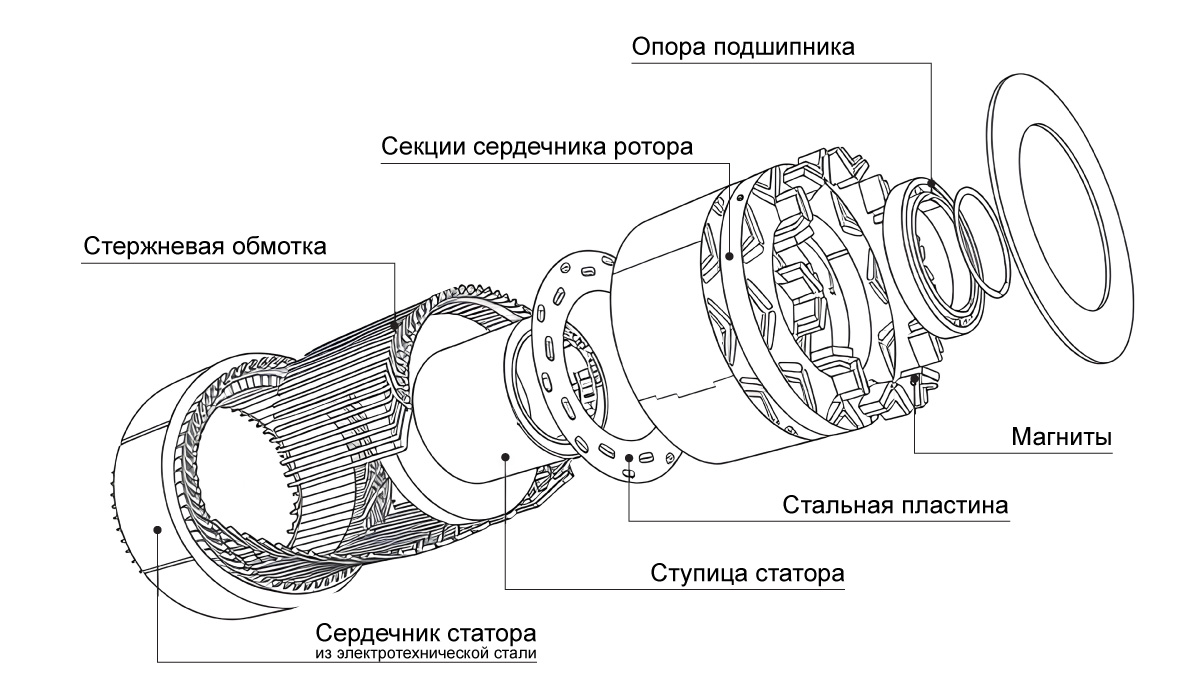
Коэрцитивная сила – это величина магнитного поля, необходимого для размагничивания материала. Чем она выше, тем устойчивее материал сохраняет намагниченность. Чаще всего постоянные магниты изготавливают из сплава железа, никеля и кобальта.
Взаимодействие их магнитных полей создает электромагнитный момент и обеспечивает синхронное вращение.СДПМ дает более точное регулирование скорости и момента и становится основой для построения современных цифровых приводов, где требования к качеству регулирования выше, чем может обеспечить классический асинхронный двигатель.
Типы СПДМ
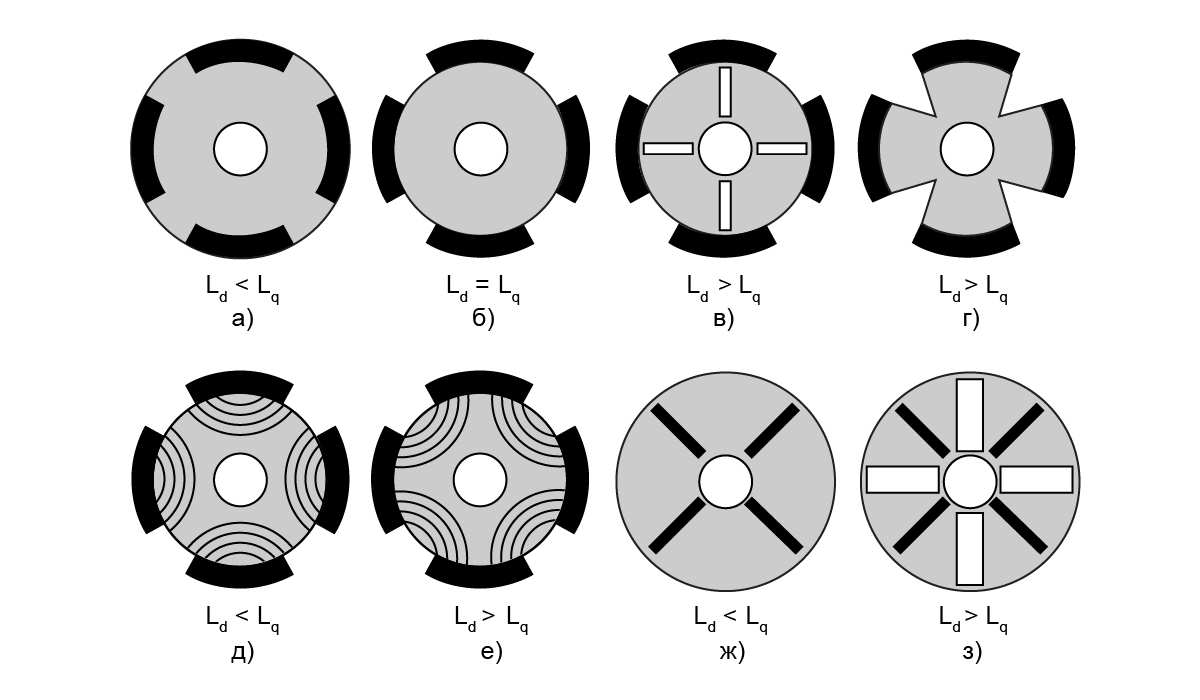
По конструкции ротора синхронные двигатели делятся на два типа электродвигателей:
- с явно выраженными полюсами, где поперечная индуктивность не равна продольной Lq ≠ Ld;
- неявно выраженными полюсами, где электродвигатель имеет равную индуктивность по продольной и поперечной осям Ld = Lq (рис. 2).
Обратная ЭДС: синусоидальная и трапецевидная форма
При вращении ротора СДПМ в обмотках статора индуцируется обратная электродвижущая сила (ЭДС) – напряжение, направленное навстречу питающему. Форма обратной ЭДС – синусоидальная или трапецеидальная –играет ключевую роль при выборе алгоритма управления, настройки преобразователя частоты и выборе типовых решений в контуре АСУ ТП(рис. 3).
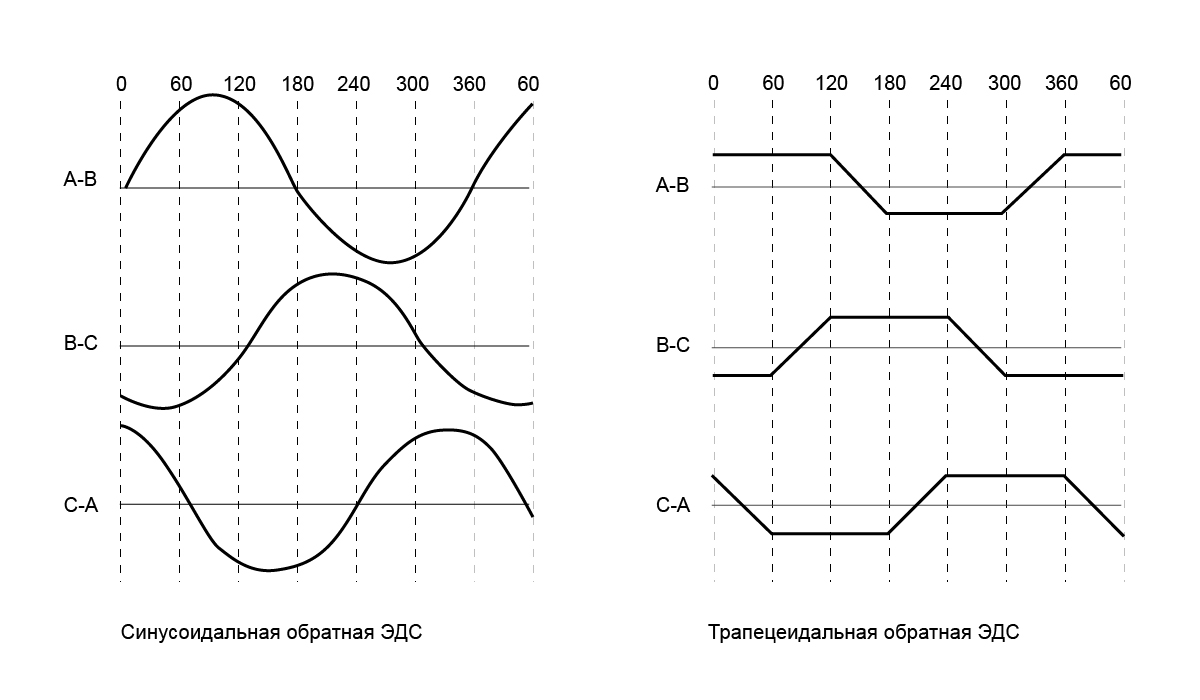
Синусоидальная ЭДС характерна для двигателей с распределенной обмоткой статора. Трапецеидальная ЭДС характерна для двигателей с сосредоточенной обмоткой (BLDC – brushless DC motor), где токи в фазах переключаются поочередно, что меняет полюса в обмотках и ведет ротор вслед за полем.
Выбор формы ЭДС для управления
Правильная идентификация формы обратной ЭДС необходима при выборе преобразователя и режима управления.
В промышленности чаще используют машины с распределенной обмоткой – то есть форму синусоидальной ЭДС: они обеспечивают более плавное управление и пригодны для прецизионных систем. Такие решения повышают точность, снижают потери и облегчают интеграцию с современными цифровыми системами управления.
Трапецеидальная ЭДС требует трапецеидального управления с коммутацией фаз по позиционным меткам. Этот метод проще, но менее плавный, а значит ограничивается применением в задачах с менее жесткими требованиями к точности.
Алгоритмы управления СДПМ
Для эффективной работы синхронного двигателя с постоянными магнитами необходимо выбрать соответствующий алгоритм управления. Выделяют следующие основные методы:
- Скалярное управление U/f
Схема проста, но данный вид управления не рекомендуется для задач, где меняется нагрузка.
- Векторное управление с датчиком положения
Один из самых эффективных видов управления, обеспечивает высокую точность регулирования скорости и положения ротора. Для такого управления обязательно необходим датчик – энкодер или резольвер. Например, для преобразователя частоты ОВЕН ПЧВ3 имеются специальные платы для подключения таких датчиков.
- Векторное управление без датчика положения
В данном случае преобразователь частоты сам высчитывает положение ротора на основе математической модели. Этот способ не требует дополнительных датчиков, но эффективен только при работе с двигателями с явно выраженными полюсами.
- Трапецеидальное управление
Один из простейших методов для управления СДПМ с трапецеидальной обратной ЭДС, когда происходит формирование магнитного поля трапецеидальной формы. Используется как с обратной связью, так и без. Управление без обратной связи не оптимально и может привести к потере управляемости. В качестве датчиков обратной связи используют датчики Холла, они позволяют определить угол поворота ротора.
Выбор преобразователя частоты
Выбор преобразователя частоты для СДПМ зависит от формы обратной ЭДС двигателя, требований к точности управления и наличия датчиков. В линейке ОВЕН доступны несколько моделей ПЧВ, которые поддерживают работу с синхронными двигателями с постоянными магнитами.
ОВЕН ПЧВ1 и MEYERTECVFD1
Модели частотных преобразователей ОВЕН ПЧВ1 и MEYERTEC VFD1 могут работать с синхронными двигателями с постоянными магнитами, но с рядом ограничений: частотные преобразователи поддерживают векторное управление без датчиков и требуют двигателей с явно выраженными полюсами.
ОВЕН ПЧВ3
Частотный преобразователь ОВЕН ПЧВ3 с платой для подключения энкодера или резольвера оптимально подходит для более точного управления и точной синхронизации. ПЧВ3 отличается высокой статической точностью, широким диапазоном регулирования и поддерживает повышенный пусковой момент.
Для того чтобы подключить двигатель к преобразователю частоты ПЧВ3, необходимо задать ряд параметров:
- Выбор режима управления – F01.00
«Режим управления двигателем» следует установить значение 12 – «PMFVC. Синхронный. Режим FVC; векторное управление с обратной связью по скорости».
- Параметры двигателя – F02
Также требуется настроить параметры самого двигателя в группе параметров F02 «Параметры двигателя» и провести его адаптацию, после чего ОВЕН ПЧВ3 сможет точно понять, каким двигателем управляет, и построить его математическую модель.
- Обратная связь – F02.30 и ПИД-регулирование – F13
Для осуществления обратной связи рекомендовано установить дополнительную плату для подключения энкодера или резольвера и произвести ее настройки в параметрах F02.30. А также корректно настроить параметры ПИД-регулятора в разделе параметров F13, исходя из ваших задач.
Синхронные двигатели с постоянными магнитами совместно с преобразователями частоты используются во многих сферах жизни – от бытовой техники до высокоточных применений, таких как станки с ЧПУ и системы вентиляции. Для управления шпиндельным приводом станка с ЧПУ целесообразно будет использовать ПЧВ3 в векторном режиме с обратной связью. Такая конфигурация поможет поддерживать высокий момент на низких оборотах, точное удержание скорости и быструю ориентацию шпинделя. В системах водоснабжения управление при помощи частотных преобразователей обеспечивает высокий КПД и стабильную работу насосных агрегатов. Перспективы развития частотных преобразователей и электроприводов на базе синхронных двигателей с постоянными магнитами связаны с повышением энергоэффективности, точности управления и внедрением передовых алгоритмов регулирования.